See below for details!
Description
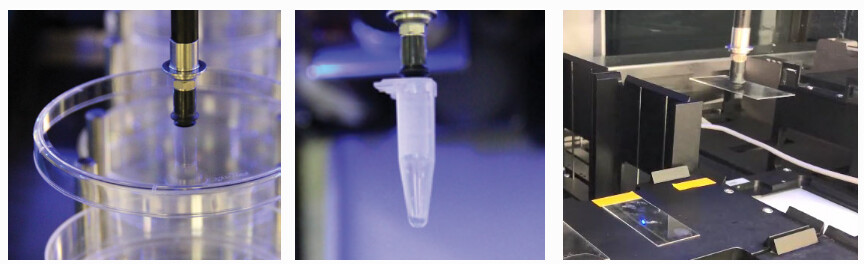
The CO-RE Suction Tool allows on-deck transportation of smaller, lightweight labware. The tool is picked up by a CO-RE 1000μL channel. The plunger drive generates a negative pressure (vacuum) on the surface of clean, flat labware objects. Compatible labware includes petri dish lids, microcentrifuge flip tubes, microscope slides, cover slides, etc. This tool can also be used to move closed Hamilton FlipTubes.
Device Details
The device is housed in an insert that can be placed on the deck in suitable tip or tube positions that are accessible by the 1000μL channel. Only one tool/one channel can be used at a time.


Device Setup
The CO-RE Suction Tool can be placed in a variety of locations on the system. The most common setup is on the waste bar where the maintenance needles are located. The seventh and eighth maintenance needle would have to be removed in order to make room for the Suction Tool. Alternatively, it could be placed in any position on a 32-position sample carrier.


Please note that it is not recommended to place the tool in the position for a 5mL maintenance needle. The site allows for too much play and may not be a robust solution for pickup and dropoff of the tool.
Software Installation
There is no additional software needed to use the CO-RE Suction Tool. The tool can be implemented using normal Tip Pickup and Aspirate commands and a custom liquid class. Using an Aspirate command allows for the option of using a Touch Off function to confirm the height of the labware. The use of Move functions in the z-axis allow for safe transport of labware. Any channel can be utilized to use the tool.
An hsl library is also available, which is called the VacToolLib. This library allows for a handful of commonly used functions to transfer lids and eject the tool. It also has built-in error handling for when it does not detect that it picked up labware. However, it does not have a help file and is limited to using channel 1 for all transport steps.
Refer to the device example method that demonstrates how to use the tool to transport multiple types of labware. The method uses both the custom library and standard Tip Pickup and Aspirate steps to perform the CO-RE Suction Tool actions. Oftentimes, it might be necessary to teach the labware at lower z-height positions in order to secure the tool properly on the labware. This adjustment may be made to the labware’s position on the system deck or via a library such as the virtual labware library to temporarily increase or lower the z-height during the transfer step.
Note: You will have to edit the ML_STARType.cfg file to make the tip type 18 “Vacuum Suction Tool” Visibility Flag set to -1 (for visible). This allows the tool to be seen as a Tip Type in the Liquid Class Editor and in the Aspirate step.
Warning: Editing the ML_STARType.cfg file will invalidate its checksum, resulting in errors when using Checksum Verification. In order to correct the checksum, disable Checksum Verification in the System Configuration Editor, edit and save the MLSTARType.cfg file, run/simulate a method to generate a new checksum, then re-enable Checksum Verification.
Labware
Labware definitions for the CO-RE Suction tool on the waste bar and in a sample carrier can be found here. In regards to labware that can be transported, the tool has been used successfully with petri dish lids, micro-centrifuge tubes, and microscope slides. The larger the labware, the more difficult it can be to securely and safely transport it around the system deck. For example, a lid for a 96-well plate may be picked up by the Suction Tool, but may not be well balanced which leads to improper transports. It is recommended to utilize other transport tools for such labware.

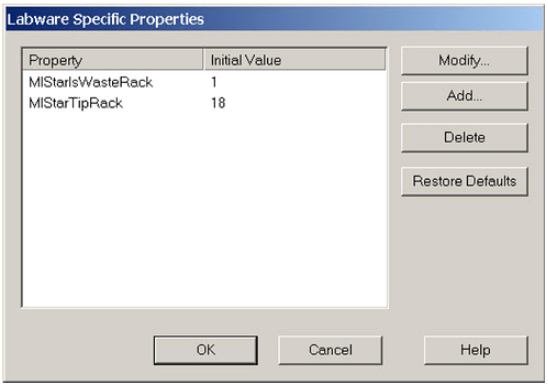
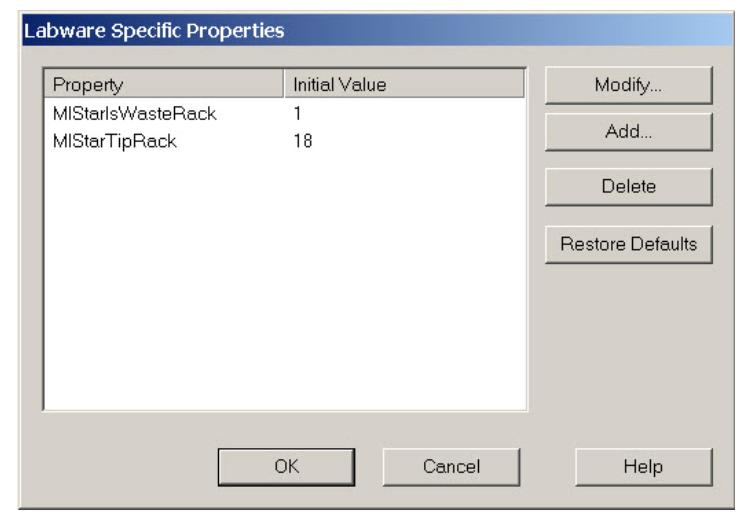
Labware Properties
The CO-RE Suction Tool labware must have the added labware specific properties to allow pickup and eject of the tool: