I am happy to share that I have just released the pyVenus package.
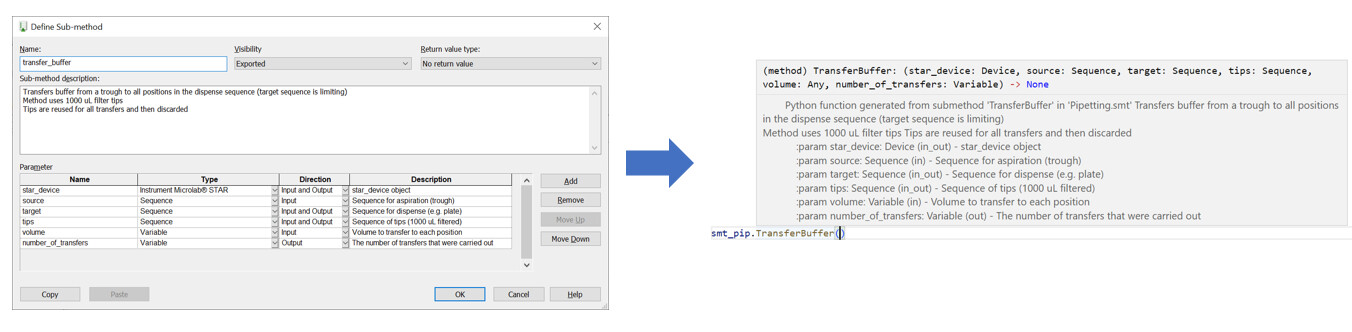
The basic functionality behind pyVenus is that you can build a deck layout and submethod libraries in Venus and then treat both as if they are native Python classes in your Python programs.
I believe this gives you the best synergy between both platforms:
You can use Venus for it’s core functionality and strengths, which boils down to defining steps related to controlling your Hamilton robot (i.e. define deck layout, pipetting & transport steps, device drivers)
While using Python for building up your methods logic and data handling
One of the big advantages with this approach is that you retain access to the multitude of device drivers that exist in the Venus world. Simply wrap any driver in a submethod library (if there isn’t one already) and it becomes callable from Python.
Sounds interesting? Read more on how it works and how to get started:
Very cool. I like the idea of leaving Venus to do the bit its good at, and using Python to do the bits its good at.
Are python tests planned? I appreciate its early stages.
pyvenus is now compatible with python 3.8 which should also make it windows 7 compatible
some general stability and usability improvements were made
I have implemented some new features to help track changes in the files produced by Venus using VCS (e.g. git). This includes the deck layout, submethod libraries, and liquid classes