I am trying to do a complex movement with the iSWAP to reach an off deck position. I apply a set of parameters to place the plate, but those same complex parameters fail when trying to retrieve the plate from the same position. Here is the error log:
2023-04-24 17:39:41> Microlab® STARlet : iSWAP Get Plate (Single Step) - start;
2023-04-24 17:39:41> Microlab® STARlet : Main - error; An error occurred while running Vector. The error description is: One or more arguments are invalid. (Complex movement for iSWAP not possible. The labware orientation doesn’t match the iSWAP’s grip direction.) (0x28 - 0x1 - 0x3)
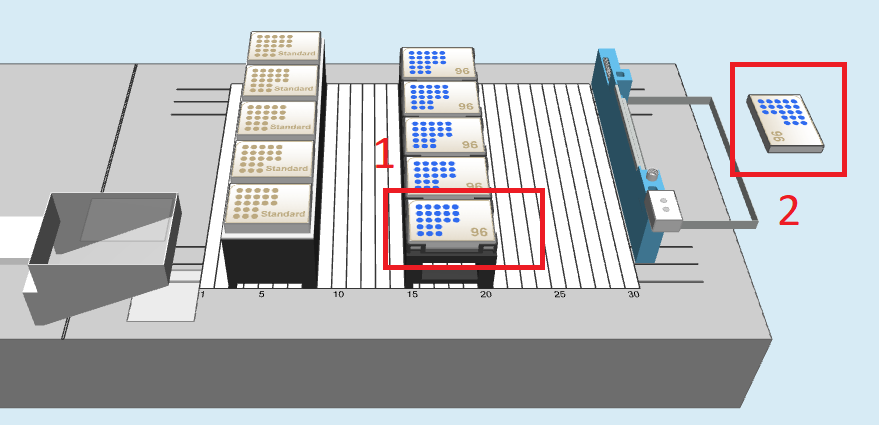
Here is my deck configuration, the position Im moving to is position 2.
Have you tried re-orienting the plate 180 so instead of A1 being in the top right corner, it’s in the bottom left? If you grip from position 1 from the top, then to reach the handoff spot, the plate will need to be oriented as I described.
Live Run
Get Plate with non-complex parameters
Place Plate with complex, orientation = 2
Get Plate with complex ← This doesn’t work with any combination of settings, always the same error. Rotating or moving the plate to a different position doesn’t seem to make a difference.
Simulation
Get Plate with non-complex parameters
Place Plate with complex, orientation = 2
Get Plate with complex, orientation = 4
Place plate with non-complex
To recap I haven’t been able to get the iSWAP to pick up a plate with complex parameters with any settings, and always the same error. What are the conditions that trigger this error?
Main - error; An error occurred while running Vector. The error description is: One or more arguments are invalid. (Complex movement for iSWAP not possible. The labware orientation doesn’t match the iSWAP’s grip direction.)
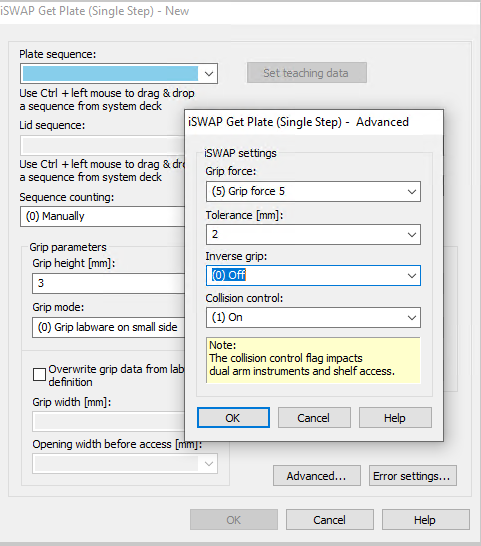
Have you toggled the inverse grip function? I have a 2D barcode scanner integrated to the left of track 1. Anytime I pick up labware on deck I need inverse grip to be off, anytime I retrieve labware from this off-deck position, I need to switch my pickup step to the ‘Inverse Grip’
Also, be sure your to check your Retract distance and Lift-up height values in your complex movement. If you want to outstretch you on the Get Plate or Place Plate, your Retract distance value must be > 138 mm and your lift height has to avoid any potential labware it would crash into.
It seems your plate location is in just the right spot that the normal iSWAP movements can’t reach it, by inverting the grip it must have changed the way it approaches the plate? Would be interesting to see the firmware logs.